核心应用领域(运动控制技术“正在”做什么?)
运动控制技术是现代自动化系统的“肌肉和神经系统”,它的高精度、高速度、高可靠性是各个领域追求的目标。

(图片来源网络,侵删)
-
工业制造与“工业4.0”
- 高端数控机床: 这是运动控制技术的传统和最高级应用领域,追求微米级甚至纳米级的定位精度和极高的表面光洁度,当前趋势是多轴联动、复合加工(车铣磨一体),以及基于数字孪生的虚拟调试和加工过程优化。
- 工业机器人: 从传统的四轴、六轴关节机器人,到协作机器人、SCARA机器人、Delta机器人,再到移动机器人,所有机器人的精准运动都依赖于运动控制,核心挑战是实现更快的运动速度、更高的轨迹精度、更平稳的启停,以及与视觉、力觉等传感器的深度融合,实现自适应抓取和装配。
- 半导体/电子制造: 这是对运动控制要求最严苛的领域之一,晶圆光刻机的工件台需要实现纳米级的超精密定位和同步;SMT贴片机的贴装头需要在极短时间内完成毫米级的精确定位;手机屏幕的贴合、激光焊接等工艺也离不开高精度的运动控制。
- 锂电与光伏设备: 新能源产业的爆发催生了大量专用设备,如叠片机、卷绕机、涂布机、激光切片机等,这些设备通常需要多轴高速、高同步协同运动,对生产效率和一致性要求极高。
-
机器人与自动化
- 协作机器人: 追求“人机共融”,要求运动控制算法必须极其安全、柔顺,能通过力/力矩传感器实现阻抗控制,在与人接触时能立即停止或“退让”。
- 移动机器人: 包括AGV(自动导引运输车)和AMR(自主移动机器人),其运动控制核心是路径规划、定位导航(SLAM)和底盘运动控制,要求实现精准的循迹、避障和自主对接。
- 仿生机器人: 如四足机器人、人形机器人,其运动控制是动态的、非结构化的,挑战在于实时平衡控制、步态规划和复杂地形适应能力。
-
航空航天与国防
- 飞行器控制: 无人机的姿态稳定、航线跟踪;卫星的姿态确定与控制;火箭的矢量喷管控制等,都依赖于高性能的运动控制算法。
- 精密武器系统: 导弹的导引控制、雷达天线的精准跟踪等。
-
医疗设备
 (图片来源网络,侵删)
(图片来源网络,侵删)- 手术机器人: 如达芬奇手术机器人,要求运动控制具有亚毫米级的精度、直观的操作手映射以及运动滤波(滤除医生手部的震颤)。
- 影像设备: CT、MRI、PET等设备的扫描床、机架的精确定位和运动控制。
- 康复机器人: 辅助患者进行康复训练,需要柔顺、安全的力位混合控制。
关键技术发展趋势(运动控制技术“正在”向何处去?)
当前的运动控制技术正朝着智能化、网络化、集成化和绿色化的方向飞速发展。
-
从“PLC+运动控制器”到“软PLC”与“一体机”
- 融合趋势: 传统的PLC(可编程逻辑控制器)负责逻辑,运动控制器负责轴运动,高性能的运动控制器集成了PLC功能,甚至可以直接在运动控制器上运行完整的HMI(人机界面)和SCADA(数据采集与监视控制)系统,即“一体机”。
- 软件定义: “软PLC”和基于PC的运动控制软件(如基于Linux/Windows的实时系统)越来越流行,利用通用处理器的强大算力,实现更灵活的控制策略和更低的成本。
-
智能化与AI的深度融合
- 参数自整定: 控制器能根据负载变化、环境扰动等,自动优化PID等控制参数,达到最佳控制效果。
- AI赋能: 利用机器学习、深度学习算法,实现:
- 预测性维护: 通过分析电机电流、振动等数据,预测潜在故障。
- 视觉引导定位: AI视觉算法与运动控制实时结合,实现对无序、柔性工件的精准抓取(如抓取随意放置的螺丝)。
- 复杂轨迹规划: 在机器人领域,AI可以生成更高效、更平滑、能耗更优的运动轨迹。
-
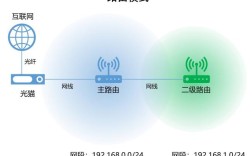
网络化与云平台化
 (图片来源网络,侵删)
(图片来源网络,侵删)- 工业以太网主导: EtherCAT、PROFINET、EtherNet/IP等高速、高同步性的工业以太网协议已成为主流,取代了传统的脉冲/方向或现场总线。
- 工业物联网: 运动控制器作为数据采集的节点,将设备状态、生产数据、能耗信息等上传到云平台,在云端进行大数据分析、远程监控、设备管理和全局优化。
- 远程运维与诊断: 专家可以通过网络远程对设备进行调试、诊断和维护,极大提升了服务效率。
-
驱动技术的革新
- 伺服驱动器一体化: 将驱动器、电机、编码器甚至控制器高度集成,形成“一体化伺服电机”,节省空间,简化布线,提高可靠性。
- 总线式驱动: 采用EtherCAT等总线协议,一根网线即可连接所有驱动器,实现分布式、高精度的同步控制。
- 能效优化: 驱动器内置能量再生单元,将制动时产生的能量回馈电网,实现绿色节能。
-
软件与算法的突破
- 高级运动控制语言: 提供更符合人类思维的高级指令,如“C轴控制”、“电子齿轮/电子凸轮”、“同步跟随”等,简化复杂运动的编程。
- 实时操作系统与仿真: 基于VxWorks, Linux RT, Windows RT等实时操作系统,确保控制指令的确定性,基于MATLAB/Simulink的模型化设计和仿真成为标配,实现“在环仿真”和“虚拟调试”,大幅缩短项目开发周期。
-
安全控制
- 安全运动: 集成了安全功能的伺服驱动器和控制器(如STO - Safe Torque Off, SLS - Safe Limited Speed)成为标配,能够在不停止整个系统的情况下,仅对特定轴的安全功能进行响应,满足ISO 13849等安全标准。
运动控制技术已经远远超出了“让电机转起来”的范畴,它正从一个独立的、底层的控制单元,演变为一个深度嵌入在智能制造体系中的、智能化的、网络化的核心子系统。
未来的运动控制,将更加“聪明”(具备自适应和学习能力)、“协同”(与视觉、力觉、AI无缝融合)、“开放”(基于标准平台,易于集成和扩展)和“绿色”(高效节能),它不仅是自动化的基石,更是实现柔性生产、个性化定制和未来智能工厂的关键驱动力。