什么是WSN定位技术?
无线传感器网络定位技术,就是确定网络中传感器节点自身位置或目标物体位置的技术,在一个典型的WSN中,只有一小部分节点知道自己的精确位置(称为锚节点,Anchor Node),而大部分节点(称为未知节点,Unknown Node)需要通过某种算法来估算自己的位置。

(图片来源网络,侵删)
定位是WSN众多应用(如环境监测、目标追踪、智能交通、军事侦察等)的基础,因为没有位置信息,数据的价值会大打折扣。
WSN定位技术的核心分类
WSN定位技术可以从不同角度进行分类,最常见的分类方式是基于测距和非测距。
基于测距的定位技术
这类技术首先需要测量未知节点与锚节点(或其他节点)之间的距离或角度,然后利用几何关系来计算未知节点的位置。
优点:定位精度相对较高。 缺点:通常需要额外的硬件支持,成本和能耗较高。

(图片来源网络,侵删)
常见测距方法:
-
RSSI (Received Signal Strength Indicator, 接收信号强度指示)
- 原理:无线电信号在传播过程中会随着距离的增加而衰减,通过测量接收到的信号强度,并利用信号传播模型(如对数-常态模型),可以反推出距离。
- 优点:无需额外硬件,几乎所有无线通信模块都支持。
- 缺点:易受环境(多径效应、障碍物、温度、湿度)影响,精度较低且不稳定。
-
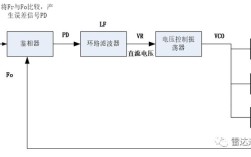
TOA (Time of Arrival, 到达时间)
- 原理:测量信号从发送端到接收端所花费的时间,乘以信号传播速度(光速),即可得到距离。
- 优点:在理想环境下精度很高。
- 缺点:要求发送方和接收方的时钟严格同步,对硬件和时间同步要求极高。
-
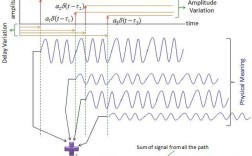
TDOA (Time Difference of Arrival, 到达时间差)
 (图片来源网络,侵删)
(图片来源网络,侵删)- 原理:节点同时接收两种不同传播速度的信号(如无线电信号和超声波信号),通过测量两种信号到达的时间差来计算距离。
- 优点:不需要发送方和接收方之间的绝对时间同步,只需接收端同步,精度比RSSI高。
- 缺点:需要额外的硬件(如超声波收发器),成本增加,且超声波传播距离短,易受遮挡。
-
AOA (Angle of Arrival, 到达角度)
- 原理:通过天线阵列或特殊硬件(如声学传感器)来测量信号到达的方向,从而确定节点间的相对角度。
- 优点:在二维平面中,只需两个锚节点即可定位,定位速度快。
- 缺点:硬件复杂且昂贵,易受外界环境干扰,多径效应影响严重。
常见测距定位算法:
- 三边测量法:在二维平面中,已知三个锚节点的坐标
(x1,y1),(x2,y2),(x3,y3)和它们到未知节点的距离d1,d2,d3,通过解方程组可以计算出未知节点的坐标。 - 三角测量法:在二维平面中,已知两个锚节点的坐标和它们到未知节点的夹角,利用三角几何关系计算出未知节点的位置。
- 最大似然估计法:当有超过三个锚节点时,可以列出多个方程组,通过最小化误差的平方和来求解最可能的坐标,是三边测量法的扩展和优化。
非测距的定位技术
这类技术不依赖于距离或角度的测量,而是利用网络连通性、跳数等拓扑信息来估算位置。
优点:对硬件要求低,成本低,能耗小,部署简单。 缺点:定位精度相对较低,且严重依赖于锚节点的密度和分布。
常见非测距定位算法:
-
质心算法
- 原理:未知节点接收其所有邻居锚节点的位置信息,然后计算这些锚节点坐标的平均值(即质心),作为自己的估计位置。
- 优点:极其简单,易于实现。
- 缺点:精度低,锚节点密度要求高。
-
DV-Hop (Distance Vector-Hop)
- 原理:
- 计算平均每跳距离:锚节点向全网广播其位置信息,其他节点记录到每个锚节点的最小跳数,锚节点根据自身已知的与其他锚节点的距离和跳数,计算一个平均每跳距离,并作为校正值广播出去。
- 估算到锚节点的距离:未知节点接收并使用来自不同锚节点的平均每跳距离,乘以自身到该锚节点的跳数,从而估算出距离。
- 定位:利用估算出的距离,采用类似三边测量法的方法计算自身位置。
- 优点:经典且应用广泛,不需要测距硬件。
- 缺点:平均每跳距离的假设在非均匀网络中误差较大。
- 原理:
-
APIT (Approximate Point-in-Triangulation Test)
- 原理:未知节点通过测试自身是否位于多个锚节点构成的三角形内部,来不断缩小自身的可能位置区域,最终将这些区域的交集作为自己的估计位置。
- 优点:对锚节点的分布要求不苛刻,性能优于质心算法。
- 缺点:实现相对复杂,需要节点能够进行移动(或模拟移动)来测试。
WSN定位技术的关键性能指标
评价一个定位算法的好坏,通常看以下几个指标:
- 定位精度:最核心的指标,指估计位置与真实位置之间的误差,通常用平均定位误差或均方根误差来衡量。
- 锚节点密度:指网络中锚节点占总节点的比例,锚节点密度越高,通常定位精度也越高,但成本也越高,一个好的算法应该能在较低的锚节点密度下达到较高的精度。
- 规模性:算法能否适用于大规模网络(成千上万个节点)。
- 功耗:定位过程需要节点进行通信和计算,会消耗大量能量,对于电池供电的WSN,低功耗至关重要。
- 鲁棒性:算法在节点失效、通信干扰、信号不稳定等恶劣环境下的适应能力。
- 成本:包括硬件成本(是否需要特殊传感器)和计算/通信成本。
总结与对比
| 分类 | 技术名称 | 原理 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|---|
| 测距 | RSSI | 信号强度衰减 | 无需额外硬件,成本低 | 易受环境影响,精度低 | 低成本、低精度要求的室内外环境监测 |
| TOA | 信号传播时间 | 精度高 | 需严格时钟同步,硬件要求高 | 高精度要求的军事、工业领域 | |
| TDOA | 信号到达时间差 | 精度较高,无需绝对同步 | 需双模硬件(如超声波),成本高 | 室内高精度定位,如智能家居 | |
| AOA | 信号到达角度 | 定位速度快 | 硬件复杂昂贵,易受干扰 | 小范围、高精度定位 | |
| 非测距 | 质心算法 | 坐标平均值 | 极其简单,易于实现 | 精度低,锚节点密度要求高 | 快速粗略定位,算法教学演示 |
| DV-Hop | 跳数估算距离 | 无需测距硬件,应用广 | 网络非均匀时误差大 | 大规模、中等精度要求的室外网络 | |
| APIT | 三角形内测试 | 锚节点分布要求低 | 实现复杂 | 锚节点分布不均的复杂环境 |
未来发展趋势
- 混合定位技术:结合测距和非测距的优点,例如先用RSSI进行粗略定位,再通过TDOA或AOA进行精细修正,以平衡成本和精度。
- 智能与自适应算法:利用机器学习、人工智能等技术,让算法能够根据网络环境动态调整定位策略,提高鲁棒性和精度。
- 三维与移动目标定位:随着应用场景的复杂化(如无人机、水下传感器网络),对三维空间和移动目标的精确定位需求日益增长。
- 低功耗与节能定位:研究更高效的通信协议和计算方法,进一步降低定位能耗,延长网络生命周期。
- 与5G/6G、物联网的融合:将WSN定位技术作为更广泛的物联网定位体系的一部分,提供无缝、高精度的位置服务。
希望这份详细的介绍能帮助您全面了解WSN定位技术!