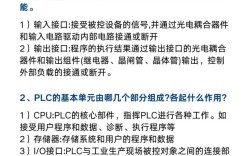
硬件层面的难点
硬件是数字IO控制的基础,硬件上的问题会直接导致软件层面的失效。

(图片来源网络,侵删)
电气噪声与干扰
- 难点描述: 工业环境复杂,存在大量的电磁干扰源,如变频器、电机、继电器等,这些干扰会通过电源线、信号线或空间辐射耦合到IO电路上,导致信号不稳定,甚至造成逻辑错误(本应是低电平的信号被干扰拉高,导致误判)。
- 典型问题: 信号“毛刺”(Glitch)、电平抖动、IO芯片闩锁效应损坏。
- 解决方案:
- 硬件滤波: 在IO端口上增加RC低通滤波电路,滤除高频噪声。
- 光电隔离: 使用光耦或继电器将控制系统的地与外部设备的地隔离开来,切断地环路电流,有效抑制共模干扰,这是最常用且最有效的方法之一。
- 屏蔽与接地: 使用屏蔽电缆,并将屏蔽层正确接地(通常一端接地),为系统和外部设备建立良好的、单一的接地系统。
- TVS管/压敏电阻: 在IO端口上并联瞬态电压抑制器或压敏电阻,防止过压冲击损坏芯片。
信号电平匹配与驱动能力
- 难点描述: 不同设备、不同芯片的IO电平标准可能不同(如TTL 5V, CMOS 3.3V, RS-232, RS-485),IO芯片的驱动电流有限,无法直接驱动大功率设备(如继电器、接触器、电机)。
- 典型问题: 逻辑电平不兼容导致信号无法正确识别;驱动能力不足导致信号幅值下降,无法触发外部设备。
- 解决方案:
- 电平转换: 使用电平转换芯片(如74HC系列、TXB/TXS系列)或分压电路(仅适用于单向且对速度要求不高的场合)进行电平匹配。
- 增加驱动电路: 使用晶体管(如MOSFET、三极管)、继电器驱动芯片(如ULN2003)或固态继电器来放大驱动能力,控制大功率负载。
长距离传输信号衰减与失真
- 难点描述: 当数字IO信号需要传输较距离(如超过几十米)时,信号会因为线路电阻、电容和电感的影响而产生衰减和畸变,导致上升/下降沿变缓,甚至无法识别。
- 典型问题: 远程设备无法响应或响应错误。
- 解决方案:
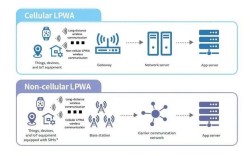
- 选择合适的接口标准: 对于长距离传输,应优先选用差分信号传输标准,如 RS-485(支持多点、长距离、抗干扰强)或 CAN总线(在汽车和工业控制中广泛应用)。
- 降低波特率: 在保证系统实时性要求的前提下,适当降低通信波特率,可以增强抗干扰能力。
- 使用线驱动器/接收器: 在发送端和接收端分别使用专线的驱动器和接收器芯片。
软件与实时性层面的难点
软件是数字IO控制的核心,其设计的优劣直接决定了系统的性能。
实时性保障
- 难点描述: 许多IO控制任务对时间有严格要求,需要精确地捕捉一个上升沿,或在某个特定时刻输出一个高电平,但通用操作系统(如Windows, Linux)是分时、非实时的,存在任务调度延迟、中断延迟等问题,无法保证严格的时序。
- 典型问题: 事件响应延迟、控制指令输出不及时,导致控制失败。
- 解决方案:
- 使用实时操作系统: 如FreeRTOS, RT-Thread, VxWorks等,RTOS提供精确的任务调度和中断管理机制,能满足硬实时或软实时需求。
- 硬件中断: 利用MCU或CPU的外部中断引脚来响应外部事件(如按钮按下),而不是通过软件轮询,可以极大提高响应速度。
- 直接内存访问: 对于需要高速、批量传输IO数据的场景(如显示屏刷新),使用DMA可以解放CPU,由硬件直接完成数据搬运,保证实时性。
并发与状态竞争
- 难点描述: 在一个复杂的系统中,多个任务(或中断服务程序)可能同时访问同一个IO端口,一个任务在设置IO为高电平的同时,另一个中断服务程序将其清零,这会导致IO的最终状态不可预测,引发严重问题。
- 典型问题: IO状态混乱,系统行为不可复现。
- 解决方案:
- 使用互斥锁: 在访问共享IO资源前,先获取锁,访问结束后释放锁,这确保了在任何时刻只有一个任务能操作该资源。
- 原子操作: 如果硬件支持,使用原子指令(如
test-and-set)来修改IO状态,避免中间状态被其他任务看到。 - 中断设计: 在关键任务执行期间,可以暂时关闭(屏蔽)特定中断,待任务完成后再重新开启。
输入信号抖动
- 难点描述: 机械开关(如按钮、行程开关)在按下或释放的瞬间,由于物理弹性的作用,其触点会在短时间内多次通断,导致IO信号产生一系列不稳定的“毛刺”,即抖动。
- 典型问题: 按下一次按钮,系统却响应了多次。
- 解决方案:
- 硬件消抖: 如前所述,使用RC滤波电路。
- 软件消抖: 这是最常用的方法,在检测到IO电平变化后,启动一个定时器(例如10ms-50ms),延时一段时间后再再次检测IO电平,如果电平仍保持变化后的状态,则确认此次变化有效,否则视为抖动并忽略。
中断服务程序 的设计
- 难点描述: ISR是实时响应的关键,但ISR的设计不当会严重影响系统性能,ISR执行时间过长会打断其他任务的执行;ISR中执行复杂操作(如打印、动态内存分配)会导致系统不稳定。
- 典型问题: 系统整体性能下降,丢中断,甚至死机。
- 解决方案:
- 保持ISR简短: ISR只做最核心的操作,如设置标志位、清除中断标志、读取少量数据,耗时长的任务(如数据处理、发送数据)应放在主循环中执行。
- 不阻塞操作: ISR中应避免调用任何可能引起阻塞的函数(如
printf,malloc)。 - 合理使用中断优先级: 为不同重要性的中断设置不同的优先级,确保高优先级的中断能及时得到响应。
系统与可靠性层面的难点
看门狗 机制
- 难点描述: 在无人值守的嵌入式系统中,程序可能因为意外的 bug、硬件故障或强干扰而陷入“死循环”或跑飞,导致系统停止工作,无法对外部事件做出响应。
- 典型问题: 系统死机,功能完全丧失。
- 解决方案:
- 硬件看门狗: 独立于CPU的硬件定时器,程序需要在规定时间内“喂狗”(复位定时器),如果超时未喂狗,看门狗将强制复位整个系统。
- 软件看门狗: 在主循环中设置一个监控任务,定期检查关键任务是否仍在正常运行,如果某个任务超时未响应,则触发系统复位或错误处理。
状态机设计
- 难点描述: 对于具有多个步骤和复杂逻辑的IO控制过程(如一个多工位的自动化设备),如果用一堆
if-else或switch-case语句来管理,代码会变得极其臃肿、难以理解和维护。 - 典型问题: 逻辑混乱,代码可读性和可维护性差,增加新功能或修改现有逻辑时容易出错。
- 解决方案:
- 使用有限状态机: 将复杂的控制逻辑抽象为有限个状态,以及在不同状态之间转换的条件和动作,这使得逻辑结构清晰,易于管理和扩展。
安全性设计
- 难点描述: 在涉及安全关键的应用中(如急停按钮、安全门锁),必须确保IO控制的绝对可靠性,一个IO的失效可能导致安全事故。
- 典型问题: 安全信号失效,系统无法进入安全状态。
- 解决方案:
- 冗余设计: 对关键的安全信号采用双通道或三通道(如2oo3 voting)的冗余检测,只有当所有通道都一致时才认为信号有效。
- 安全继电器/安全PLC: 使用专门的安全硬件,它们内置了冗余和自检电路,符合国际安全标准(如IEC 61508, SIL)。
- 故障安全设计: 设计系统使其在发生故障时,自动进入一个已知的、安全的状态(电机断电、阀门关闭)。
数字IO控制技术的难点是一个系统工程问题,需要从硬件、软件、系统架构三个层面综合考虑。
| 难点类别 | 核心问题 | 常用解决方案 |
|---|---|---|
| 硬件层面 | 噪声干扰、电平不匹配、驱动不足、长距离衰减 | 光电隔离、RC滤波、电平转换、增加驱动电路、使用RS-485/CAN等差分总线 |
| 软件层面 | 实时性差、并发竞争、信号抖动、ISR设计不当 | 使用RTOS、硬件中断、软件消抖、互斥锁、保持ISR简短 |
| 系统层面 | 系统死机、逻辑复杂、安全性要求高 | 看门狗机制、状态机设计、硬件冗余、安全继电器/安全PLC |
在实际项目中,一个稳定可靠的数字IO控制系统,往往是这些技术和方法综合运用的结果,设计者必须根据具体的应用场景(如成本、性能、环境、安全等级)来权衡和选择最合适的解决方案。

(图片来源网络,侵删)