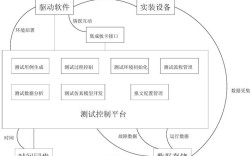
下面我将从测试目标、测试层级、测试方法、常用工具和关键测试点等多个维度,全面系统地介绍CAN总线系统的测试技术。

(图片来源网络,侵删)
测试目标与意义
CAN总线测试的根本目标是确保总线系统的通信可靠性、稳定性和功能性,具体包括:
- 功能正确性:验证ECU(电子控制单元)发送和接收的报文内容、格式、时序是否符合设计规范(如CAN LDF/ARXML文件)。
- 性能指标:测试总线在负载率、延迟、错误处理等方面的性能是否满足要求。
- 鲁棒性:验证系统在恶劣环境(如电磁干扰、电源波动)或异常工况(如总线错误、节点故障)下的抗干扰能力和恢复能力。
- 兼容性:确保新开发的ECU能够与现有或不同厂商的ECU在总线上正常通信,不会产生冲突。
- 安全性:对于功能安全相关的系统(如ISO 26262),需要验证安全机制(如Watchdog、错误计数器)的有效性。
测试层级(金字塔模型)
CAN总线测试可以遵循经典的V模型,分为不同层级,从底层到顶层逐步验证。
硬件层测试
测试CAN收发器、终端电阻、线束等物理硬件是否符合要求。
- :
- 线束导通/短路/断路测试:使用万用表或线束测试仪检查CAN_H和CAN_L线是否正确连接,有无对电源、地、其他线路的短路。
- 终端电阻测试:测量总线两端的终端电阻值(通常为120Ω),确保其符合规范。
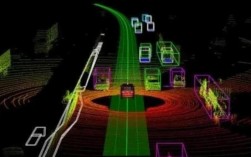
- 信号质量测试:使用示波器或CAN分析仪测量CAN_H和CAN_L的差分电压、上升/下降时间、过冲、振铃等,确保信号波形干净、无失真。
- 电磁兼容性 测试:在电波暗室等环境中,测试系统对外辐射的抗干扰能力和自身抗辐射干扰的能力。
协议层测试
测试CAN控制器和节点的软件协议栈是否正确实现CAN协议(如CAN 2.0A/B, CAN FD)。

(图片来源网络,侵删)
- :
- 帧格式测试:验证标准帧、扩展帧、远程帧、过载帧的格式和位场(如IDE、RTR、SRR位)是否正确。
- 位定时参数测试:测试位时间中的同步段、传播段、相位段1和2的设置是否合理,确保节点能正确同步,尤其是在不同波特率下。
- 错误处理机制测试:主动触发位错误、填充错误、CRC错误等,验证错误计数器(TEC/REC)是否按协议规则变化,以及节点进入错误被动、总线关闭等状态的行为是否正确。
- 总线状态管理测试:验证“显性”和“隐性”状态的定义,以及总线仲裁机制。
网络层与应用层测试
这是最高层级的测试,关注的是报文和应用逻辑。
- :
- 测试:验证每个报文的ID、数据长度、数据字节是否符合LDF/ARXML等网络描述文件的定义。
- 信号值测试:解析报文数据,验证其中包含的信号(如车速、转速、温度)的值是否正确。
- 报文周期与触发性测试:验证周期性报文的发送周期是否准确,事件触发报文是否在满足条件时被正确发送。
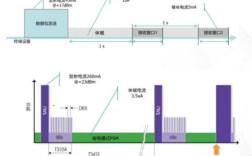
- 网络管理 测试:验证节点上下电、心跳、睡眠/唤醒等网络管理功能是否按预期工作。
- 应用逻辑测试:验证基于CAN报文交互的业务逻辑是否正确,当刹车信号报文收到后,ABS系统是否做出正确的响应。
核心测试方法
黑盒测试
不关心内部实现,只关注输入和输出。
- 应用场景:功能测试、集成测试。
- 方法:向总线发送特定报文,观察被测节点的响应报文或行为是否符合预期,发送一个“加速踏板位置”报文,检查“发动机扭矩”报文是否按预期变化。
- 优点:贴近用户视角,易于上手。
- 缺点:无法覆盖内部逻辑路径。
白盒测试
基于对内部代码和设计的了解来设计测试用例。
- 应用场景:单元测试、协议栈测试。
- 方法:针对代码中的特定分支、循环或错误处理逻辑设计测试用例,为了测试错误计数器达到127后进入错误被动状态,可以编写一个脚本来持续发送错误帧。
- 优点:测试覆盖率高,能发现深层次问题。
- 缺点:需要访问源代码和详细设计文档,成本高。
灰盒测试
结合黑盒和白盒的特点,既关注外部行为,也了解部分内部结构。

(图片来源网络,侵删)
- 应用场景:大多数集成测试和系统测试。
- 方法:通过监控总线上的报文和节点的内部状态(如通过诊断服务读取错误计数器),来验证外部行为和内部状态的一致性,这是CAN总线测试中最常用、最有效的方法。
常用测试工具
硬件工具
- CAN分析仪/接口卡:
- 功能:连接PC与CAN总线,实现报文的收发、监控、记录和分析。
- 主流品牌:Vector (VN16xx系列)、Intrepid Control Systems (Vehicle Spy)、PEAK-System (PCAN系列)、Kvaser (Leaf Light系列)。
- 示波器:
- 功能:用于硬件层的信号质量分析,查看CAN总线的物理波形。
- CAN总线测试盒/工具箱:
- 功能:集成了CAN分析仪、终端电阻、电源、诊断接口等,方便现场测试。
软件工具
- 总线监控与分析软件:
- 功能:实时显示总线上的报文,以列表、图形、信号仪表盘等形式展示数据。
- 主流软件:Vector CANalyzer、Intrepid Vehicle Spy。
- 仿真与测试软件:
- 功能:模拟ECU发送报文,或者模拟被测ECU所依赖的其他节点(即“HIL测试”中的模型)。
- 主流软件:Vector CANoe、ETAS INCA。
- 自动化测试框架:
- 功能:用于编写、管理和执行自动化测试脚本。
- 主流框架:Python +
python-can/cantools库、Vector CAPL、MATLAB/Simulink。
关键测试点与场景举例
负载测试
- 目的:验证系统在高负载下的性能。
- 方法:使用CANoe等工具模拟多个节点同时发送报文,将总线负载率提升到目标值(如40%、60%、80%),观察是否有报文丢失、延迟增加或错误帧增多的情况。
错误注入测试
- 目的:验证系统的错误处理和容错能力。
- 方法:使用支持错误注入功能的硬件或软件工具,在总线上主动插入以下错误:
- 位错误:在总线上发送一个与总线当前电平相反的位。
- 填充错误:连续发送6个相同电平的位(破坏位填充规则)。
- CRC错误:在报文末尾发送错误的CRC序列。
- 格式错误:发送一个非法的位场组合。
- 观察:被测节点是否能检测到错误,并做出正确反应(如发送错误帧、进入错误被动状态等)。
长线测试
- 目的:验证CAN总线在较长距离下的通信可靠性。
- 方法:将总线长度延长到设计极限(如1km @ 50kbps),测试所有节点是否能正常通信,信号质量是否依然合格。
节点插拔测试
- 目的:验证总线对节点热插拔的鲁棒性。
- 方法:在总线正常工作时,反复插拔一个节点,观察总线是否会因此产生大量错误帧或导致其他节点通信中断。
网络管理测试
- 目的:验证上下电、睡眠唤醒流程的正确性。
- 方法:
- 上电测试:给某个节点上电,观察它是否发送“上线