以下我将从核心功能、性能要求、开发流程、关键挑战等多个维度,为您系统地梳理车内电子控制技术的核心要求。

(图片来源网络,侵删)
核心功能要求
车内电子控制系统根据其控制对象的不同,可以分为几个主要系统,每个系统都有其特定的功能要求:
动力总成控制系统
- 发动机控制: 精确控制燃油喷射、点火正时、进气量、EGR(废气再循环)、VVT(可变气门正时)等,以实现最佳的动力性、燃油经济性和排放性能。
- 变速箱控制: 自动控制换挡逻辑、液力变矩器锁止、离合器结合/分离,确保换挡平顺、响应迅速。
- 混合动力/纯电控制: 管理电池充放电、电机扭矩分配、能量回收模式切换,实现不同驾驶模式下的高效运行。
底盘控制系统
- 防抱死制动系统: 防止车轮在紧急制动时抱死,保证车辆转向能力。
- 电子制动力分配: 根据路面状况和载荷动态分配前后轮、左右轮的制动力。
- 电子稳定程序: 通过主动对单个车轮施加制动,帮助驾驶员在转向不足或过度时稳定车辆。
- 电动助力转向: 根据车速提供可变的转向助力,低速轻便,高速沉稳。
- 主动悬架: 实时调节悬架的软硬和高低,兼顾舒适性和操控性。
车身电子系统
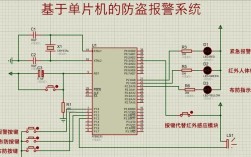
- 中央门锁与防盗: 提供遥控上锁/解锁、无钥匙进入、发动机防盗启动等功能。
- 车窗/天窗控制: 一键升降、防夹保护、延时关闭。
- 灯光控制: 自动大灯、日间行车灯、转向灯、刹车灯、氛围灯的智能控制。
- 空调系统控制: 自动调节温度、风量、内外循环模式,并实现分区控制。
信息娱乐与网联系统
- 信息娱乐: 提供导航、音频、视频、蓝牙电话等功能。
- 人机交互: 通过触摸屏、语音、按键、手势等多种方式与驾驶员交互。
- 车联网: 实现车辆与云端、车辆与车辆、车辆与基础设施的通信,提供OTA升级、远程控制、紧急呼叫等服务。
高级驾驶辅助系统
- 自适应巡航: 在巡航时自动与前车保持安全距离。
- 车道保持辅助: 在车辆偏离车道时提供警示或主动纠正。
- 自动紧急制动: 在检测到碰撞风险时自动刹车。
- 360度全景影像: 提供车辆周围的鸟瞰视图,辅助泊车。
通用性能与质量要求
无论哪个系统,其ECU都必须满足一系列严苛的通用性能要求,这是保证汽车安全、可靠、舒适的基础。
可靠性与耐久性
- 工作温度范围: 必须在极端温度下(如-40°C 至 +125°C)正常工作。
- 抗振动与冲击: 能承受车辆行驶过程中的持续振动和偶然的剧烈冲击。
- 电磁兼容性:
- 抗干扰性: 必须能抵抗来自车载其他电器(如电机、点火系统)和外部环境(如手机基站、雷达)的电磁干扰,避免误动作。
- 发射干扰性: 自身产生的电磁辐射必须低于法规限值,避免干扰其他车辆设备。
- 寿命: 要求设计寿命通常在10-15年或行驶里程超过20万公里。
实时性与确定性
- 实时响应: 控制系统必须在严格规定的时间内(毫秒甚至微秒级)对传感器信号做出响应并执行控制指令,ABS的决策周期必须极短。
- 确定性: 系统的响应时间必须是可预测和稳定的,不能有随机延迟,这对于安全关键系统(如制动、转向)至关重要。
安全性
- 功能安全: 遵循国际标准 ISO 26262,从概念阶段到开发、生产、报废的全生命周期,都需进行风险分析和安全设计,以防止因系统故障而导致的人身伤害,这包括定义汽车安全完整性等级,ASIL等级越高,要求越严格。
- 硬件安全: 包括硬件随机数生成器、安全启动、安全内存访问、加密算法引擎等,以防止恶意攻击。
- 网络安全: 遵循 ISO/SAE 21434 标准,保护车辆免受网络攻击,如数据窃取、远程控制等。
精确性与准确性
- 传感器数据精度: 传感器(如轮速、压力、温度传感器)的测量数据必须足够精确,才能做出正确的控制决策。
- 执行器控制精度: 对喷油量、电机扭矩等的控制必须高度精确,以达到理想效果。
软件质量
- 代码质量: 遵循严格的编码规范(如MISRA C/C++),进行充分的静态代码分析,避免逻辑错误、内存泄漏等问题。
- 可维护性与可升级性: 软件架构应模块化,便于后期维护和功能升级,这是实现OTA(Over-The-Air)升级的基础。
- 可测试性: 软件设计需考虑易于在台架、整车环境下进行单元测试、集成测试和硬件在环测试。
开发与验证流程要求
现代汽车电子控制系统的开发遵循一套严谨的流程,确保最终产品满足所有要求。
- 需求分析与定义: 明确系统的功能需求、性能指标、安全目标和法规要求。
- 系统架构设计: 设计硬件(MCU选型、电路设计)、软件(AUTOSAR架构)、网络通信(CAN/FD/Ethernet)的总体方案。
- 软硬件开发:
- 硬件开发: 原理图设计、PCB布局、样机制作。
- 软件开发: 基于AUTOSAR等标准架构进行应用层和基础软件的开发。
- 仿真与测试:
- 软件在环: 在PC上运行软件模型,进行算法验证。
- 硬件在环: 将真实的ECU接入仿真环境中,模拟各种传感器信号和负载,进行系统级测试。
- 台架测试: 在实验室环境下的整车级测试。
- 整车测试: 在实际道路上进行各种工况下的测试和标定。
- 验证与确认: 确保产品完全符合最初定义的需求和标准。
- 生产与售后: 确保生产过程的稳定性,并提供完善的售后支持和软件更新。
未来趋势与新兴要求
随着汽车向“新四化”(电动化、智能化、网联化、共享化)发展,对电子控制技术的要求也在不断演进。

(图片来源网络,侵删)
- 软件定义汽车: 要求系统架构从“分布式”向“集中式”或“域集中式”演进,硬件平台化,软件定义功能,这要求更高的计算能力、更开放的操作系统和更强的OTA能力。
- 功能安全与网络安全融合: ASIL功能安全要求和网络安全要求不再是孤立的,而是需要在一个统一的框架下协同考虑。
- 高算力与高带宽: 智能化需要强大的中央计算平台,支持AI算法运行;高清摄像头、雷达等传感器需要高带宽的车载网络(如车载以太网)。
- 数据安全与隐私保护: 车辆收集的大量数据(位置、行为、生物特征)需要得到严格保护,满足日益严格的全球数据隐私法规(如GDPR)。
车内电子控制技术的要求是一个多维度、高标准的复杂体系,它不仅要求功能正确、性能可靠,更要求安全第一、面向未来,随着汽车产业的变革,电子控制技术正从传统的“机电控制”向“软件定义”和“智能决策”深度演进,其技术要求也在不断拔高,成为衡量汽车核心技术竞争力的关键指标。

(图片来源网络,侵删)