我们将以一个“智能宠物追踪器”为例,这是 GPS 技术在消费级电子产品中一个非常经典和成熟的应用。

(图片来源网络,侵删)
项目名称:智能宠物追踪器 “PawTrack”
项目概述与需求分析
1. 项目目标 设计一款小巧、轻便、续航长的 GPS 追踪器,通过蜂窝网络(如 NB-IoT)将宠物位置信息实时上传到云端服务器,并通过手机 App 让主人可以随时查看宠物位置、设置安全区域,并在宠物走失时快速找回。
2. 核心功能需求
- 实时定位: 能够获取宠物当前的经纬度坐标。
- 位置追踪: 能够按照设定的时间间隔(如每 5 分钟)上报位置,或在宠物移动时动态上报。
- 电子围栏: 主人可以在 App 上设定一个安全区域(如“家”或“小区”),当宠物进入或离开该区域时,系统向主人的手机发送警报。
- 历史轨迹回放: 能够查询并显示宠物在过去一段时间(如 24 小时)内的移动路径。
- 低功耗设计: 追踪器电池续航至少达到 7 天以上,以减少充电频率。
- 坚固耐用: 外壳需防水、防尘、防咬,适应宠物的日常活动。
3. 技术挑战
- 功耗管理: GPS 模块是耗电大户,如何平衡定位精度和续航是最大的挑战。
- 成本控制: BOM(物料清单)成本需要控制在一定范围内,以保证市场竞争力。
- 网络覆盖: 需要选择覆盖广、功耗低的蜂窝网络技术。
- 数据安全: 宠物位置数据属于隐私,需确保数据传输和存储的安全性。
系统总体架构设计
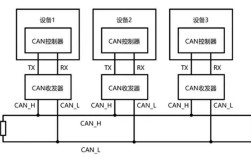
一个完整的 GPS 追踪系统通常由四个部分组成:硬件终端、通信网络、云平台 和 用户应用。

(图片来源网络,侵删)
graph TD
subgraph 硬件终端
A[GPS模块] -- 定位数据 --> B[主控MCU]
C[蜂窝通信模块] -- 数据上传 --> D[云端服务器]
B -- 控制指令 --> A
B -- 控制指令 --> C
E[电源管理单元] -- 供电 --> B
E -- 供电 --> A
E -- 供电 --> C
end
subgraph 云端平台
D[云服务器] -- 存储与处理 --> F[数据库]
D -- API接口 --> G[手机App]
D -- API接口 --> H[Web管理端]
end
subgraph 用户端
G[手机App] -- 接收警报/查看位置 --> I[宠物主人]
end
B -- 位置数据 --> C
C -- 经纬度/状态信息 --> D
D -- 警报/历史数据 --> G
硬件设计详解
硬件是实现所有功能的基础,其核心在于低功耗设计。
1. 核心元器件选型
| 模块 | 推荐型号/类型 | 选型理由 |
|---|---|---|
| 主控 MCU | ARM Cortex-M0+/M3 (如 STM32L0/L4 系列) | 低功耗是关键,Cortex-M0+ 是目前能效比最高的内核之一,STM32L 系列拥有多种低功耗模式(Sleep, Stop, Standby),可以在不工作时将功耗降至微安级别。 |
| GPS 模块 | UBLOX NEO-M8N / M10 或 Quectel L86 | 功耗与精度的平衡,这些模块支持多种功耗模式,如 Max. Performance (高精度,高功耗) 和 Power Save (低功耗,定位时间稍长),支持 Assisted GPS (A-GPS) 技术,可通过蜂窝网络快速获取星历数据,极大缩短首次定位时间,减少 GPS 模块的开启时长。 |
| 蜂窝通信模块 | NB-IoT / LTE-M 模块 (如 SIM7020, EC25) | 专为 IoT 设计,相比传统 2G/3G,NB-IoT/LTE-M 具有功耗极低、覆盖广、连接数多、成本低的优势,非常适合这种小数据量、低频次传输的追踪器。 |
| 电源管理单元 | DC-DC 转换器 & 低功耗 LDO | 高效的电源管理可以最大限度减少能量损耗,选择静态电流极低的 LDO 为传感器供电,使用高效的 DC-DC 转换器为 GPS 和通信模块供电。 |
| 传感器 | 加速度计 (如 BMA425) | 智能唤醒的关键,通过检测宠物的移动状态(静止、慢走、快跑),可以实现动态定位,当宠物静止时,让 GPS 和蜂窝模块长时间休眠;当检测到剧烈运动时,才唤醒定位模块进行追踪,这能极大地延长电池寿命。 |
| 电源 | 锂亚电池 (Li-SOCl2) 或 锂聚合物电池 (Li-Po) | 能量密度高,锂亚电池能量密度极高,但不可充电,适合一次使用数年的场景,锂聚合物电池可充电,配合磁吸充电座,用户体验更好,本设计选择后者。 |
2. 硬件低功耗设计策略
这是硬件设计的灵魂,具体实现如下:

(图片来源网络,侵删)
- 分域供电: 使用 MOSFET 或 PMOS 开关管,由 MCU 的 GPIO 口控制,为 GPS 模块和蜂窝模块提供独立的电源,在不使用时,直接切断其供电,仅保留 MCU 和传感器的待机功耗。
- 多级休眠模式:
- 深度休眠: 当宠物长时间静止时,MCU 进入
STOP或STANDBY模式,仅保留 RTC(实时时钟)和外部中断引脚工作,此时整机电流可低至 10μA 以下。 - 浅度休眠: MCU 周期性地(如每 30 分钟)从深度休眠中唤醒,通过加速度计判断宠物状态,如果宠物在移动,则进入浅度休眠,准备进行定位。
- 深度休眠: 当宠物长时间静止时,MCU 进入
- GPS 快速捕获: 启动 GPS 前,确保已通过蜂窝网络获取了最新的 A-GPS 数据(星历和历书),将冷启动时间从 30-45 秒缩短到 5-10 秒,大幅减少 GPS 模块的开启功耗。
- 智能定位策略:
- 静态模式: 每 2 小时唤醒一次,定位一次,记录位置后继续休眠。
- 动态模式: 加速度计检测到宠物在奔跑或剧烈移动时,唤醒 GPS 模块,以更高频率(如每 5 分钟)进行定位和上报。
- 离开安全区模式: 一旦触发电子围栏警报,立即进入动态模式,并上报实时位置。
软件与固件设计
软件是硬件的大脑,负责协调各个模块,并实现核心业务逻辑。
1. 固件设计
固件运行在主控 MCU 上,采用事件驱动和状态机的设计模式。
// 伪代码示例:主循环逻辑
void main_loop() {
// 1. 初始化硬件
init_hardware();
// 2. 进入主循环
while(1) {
// 3. 进入低功耗模式,等待中断
enter_low_power_mode();
// 4. 被中断唤醒后,根据中断源执行相应任务
if (accelerometer_interrupt) { // 加速度计中断
handle_movement();
}
if (rtc_alarm_interrupt) { // RTC 定时中断
handle_periodic_task();
}
}
}
void handle_movement() {
// 读取加速度计数据
if (is_pet_moving()) {
// 进入动态模式
set_tracking_mode(DYNAMIC);
power_on_gps();
get_location();
power_off_gps();
send_location_to_cellular();
}
// 如果是误判或轻微移动,不做处理,继续休眠
}
2. 云平台设计
云平台是系统的数据中心和业务逻辑中心。
- 技术栈: 通常采用 微服务架构,例如使用 Spring Boot (Java) 或 Node.js 框架。
- 核心组件:
- 设备管理服务: 负责处理来自硬件终端的连接认证、心跳包、指令下发(如修改上报频率)。
- 数据存储服务:
- 时序数据库 (InfluxDB, TimescaleDB): 存储海量的、带时间戳的位置数据,非常适合查询历史轨迹。
- 关系型数据库 (MySQL, PostgreSQL): 存储用户信息、设备信息、电子围栏配置等结构化数据。
- 地理围栏服务: 后台定时任务或通过消息队列接收设备上报的位置,利用空间查询算法(如 GeoJSON 解析)判断该点是否在预设的 Polygon(多边形)区域内,如果状态发生变化,则触发警报。
- API 网关: 提供统一的 RESTful API 或 GraphQL 接口,供手机 App 和 Web 端调用。
- 数据流:
- 终端通过 MQTT 协议连接到云平台的 MQTT Broker。
- 终端上报
{"device_id": "xxx", "lat": 39.9, "lng": 116.4, "timestamp": ...}。 - MQTT Broker 将消息推送到
device/xxx主题。 - 设备管理服务 订阅该主题,解析数据,验证设备合法性。
- 将合法的位置数据存入 时序数据库。
- 地理围栏服务 从数据库查询该设备最新的位置,并与围栏配置进行比对。
- 如果状态变化(从“内”到“外”),则调用 消息服务(如阿里云短信服务或极光推送),向用户发送警报。
3. 手机 App 设计
- 平台: 原生开发 (iOS/Swift, Android/Kotlin) 或跨平台开发 (Flutter, React Native)。
- 核心功能:
- 地图展示: 集成高德地图、Google Maps 或 Mapbox SDK,实时显示宠物位置。
- 历史轨迹: 调用云平台 API,获取过去 24 小时的位置点,并在地图上连成线。
- 电子围栏管理: 提供在地图上绘制圆形或多边形围栏的界面,并将配置通过 API 上报到云平台。
- 设备设置: 调整定位频率、电量查看、固件升级等。
定位算法优化
除了硬件和软件的低功耗设计,定位算法本身也可以优化。
- A-GPS (Assisted GPS): 如前所述,这是最重要的优化,它利用蜂窝网络的数据来辅助 GPS 接收机,极大地缩短了首次定位时间。
- Wi-Fi 定位: 在 GPS 信号弱或无信号的室内环境(如地下室、车库),可以开启 Wi-Fi 定位,通过扫描周围的 Wi-Fi 热点信息,并查询云端庞大的 Wi-Fi 指纹数据库,也能估算出大致位置。
- 基站定位 (LBS): 作为最后一级兜底方案,当 GPS 和 Wi-Fi 都不可用时,通过连接的蜂窝基站信息(Cell ID),可以计算出宠物所在的大概范围(几百米到几公里)。
这个“智能宠物追踪器”的设计实例,展示了如何将 GPS 技术从一个单纯的定位功能,设计成一个完整的、低功耗的、智能化的物联网系统。
其核心设计思想可以概括为:
- 系统化思维: 将问题分解为硬件、通信、云、应用四个层面进行协同设计。
- 功耗为王: 在电池供电的设备中,低功耗设计是贯穿始终的最高原则,通过硬件选型、软件架构和算法优化共同实现。
- 智能决策: 利用传感器(加速度计)实现状态感知,从而动态调整工作模式,从“被动定时上报”升级为“智能按需上报”。
- 云端赋能: 云平台不仅是数据存储中心,更是实现复杂业务逻辑(如电子围栏、历史轨迹)和提供丰富用户服务的大脑。
通过这样的设计,我们最终才能打造出一款既精准可靠,又续航长、体验好的消费级 GPS 产品。