核心概念解析
什么是固态振动陀螺?
我们把它拆解开来理解:

(图片来源网络,侵删)
- 固态: 指的是陀螺仪内部没有高速旋转的机械转子(就像传统陀螺仪那样),它由半导体材料(如硅、石英)制成,内部结构是固定的,没有活动部件(或活动部件极小),这带来了极高的可靠性、抗冲击、长寿命和低成本。
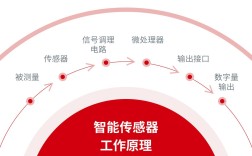
- 振动: 它的工作原理不是基于旋转,而是基于科里奥利效应,它通过驱动一个或多个振动部件(如音叉、谐振环、半球壳)以固定频率进行振动。
- 陀螺: 当这个振动系统整体旋转时,科里奥利力会作用在振动部件上,产生一个与旋转方向垂直的附加振动或位移,通过检测这个微小的附加振动,就可以精确地测量出旋转角速度。
简单比喻: 想象一下,你站在一个旋转的木马上,手里拿着一个正在前后摆动的秋千。
- 旋转木马 就是你想测量的旋转角速度。
- 秋千的摆动 就是陀螺仪的驱动振动。
- 由于你在旋转,你会感觉秋千在向侧面推你,这个侧向的力就是科里奥利力。
- 陀螺仪做的就是精确测量这个“侧向推力”的大小,从而计算出旋转木马转得多快。
什么是导航技术?
导航技术是确定一个物体(如飞机、汽车、手机)的位置、速度和姿态(航向、俯仰、横滚)的技术,现代导航系统通常是多传感器融合的结果,主要包括:
- 惯性导航系统: 核心是惯性测量单元,包含陀螺仪(测量角速度)和加速度计(测量线加速度),通过积分计算,可以实时推算出载体的位置、速度和姿态,它的优点是完全自主、不依赖外部信号,缺点是误差会随时间累积。
- 卫星导航系统: 如GPS、北斗、GLONASS,通过接收卫星信号来精确确定位置和速度,优点是精度高、误差不随时间累积,但缺点是依赖外部信号,在室内、水下、隧道或受干扰时可能失效。
- 其他辅助导航: 如视觉导航、地磁导航、里程计等。
固态振动陀螺在导航技术中的核心作用
固态振动陀螺是现代惯性导航系统的“眼睛”和“耳朵”,它负责感知载体的旋转运动,没有它,惯性导航就无法确定姿态。
作为惯性测量单元的核心部件
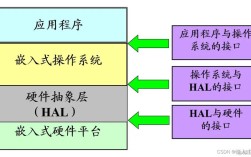
一个典型的IMU包含:

(图片来源网络,侵删)
- 3个陀螺仪: 分别测量绕X、Y、Z三个轴的角速度。
- 3个加速度计: 分别测量沿X、Y、Z三个轴的线加速度。
固态振动陀螺凭借其优势,已经成为现代IMU,尤其是微型IMU和战术级IMU的首选,根据性能,陀螺仪通常分为:
| 等级 | 陀螺仪类型 | 随机游走 | 应用场景 | 固态振动陀螺的地位 |
|---|---|---|---|---|
| 导航级 | 激光陀螺、光纤陀螺 | 极低 (0.001°/√h) | 军舰、战略导弹、民航客机 | 主流,但体积大、成本高,固态陀螺正在追赶。 |
| 战术级 | MEMS陀螺 | 较低 (0.01-0.1°/√h) | 军用无人机、导弹、制导炸弹 | 绝对主流,固态振动陀螺凭借性价比和性能优势主导市场。 |
| 消费级 | MEMS陀螺 | 较高 (1-10°/√h) | 智能手机、无人机、VR/AR、汽车电子 | 唯一选择,几乎全部是固态振动陀螺(音叉式、谐振式等)。 |
推动导航技术的“小型化、低成本化革命”
固态振动陀螺的出现,尤其是MEMS(微机电系统)技术,彻底改变了导航领域:
- 小型化: 从一个需要机柜大小的设备,缩小到可以集成在芯片上,尺寸仅几毫米,这使得导航系统可以嵌入到手机、手表、无人机、小型机器人等任何设备中。
- 低成本: 批量生产使得单个陀螺仪的成本从数千美元降低到几美元甚至更低,这极大地普及了导航技术的应用,从高端军事装备走向了大众消费市场。
- 低功耗、高可靠性: 没有活动部件,功耗极低,抗冲击振动能力远超机械陀螺,非常适合移动设备和恶劣环境。
实现组合导航,优势互补
由于纯惯性导航的误差会累积,而卫星导航在特定环境下会失效,现代导航系统普遍采用组合导航,最常见的就是惯性/卫星组合导航。
- 工作模式:
- 正常情况下: 以卫星导航的高精度信息为主,同时利用这些信息来校正和补偿惯性导航的累积误差(这个过程称为“卡尔曼滤波”)。
- 信号丢失时(如隧道、高楼间): 系统自动切换到纯惯性导航模式,固态振动陀螺和加速度计会“接管”导航任务,在短时间内提供相当精确的位置、速度和姿态信息,直到卫星信号重新捕获。
固态振动陀螺在此过程中的角色: 它是组合导航系统在“信号丢失”期间的“记忆”和“姿态基准”,它的精度直接决定了系统在没有外部信号时能“坚持”多久以及精度有多高。

(图片来源网络,侵删)
主流的固态振动陀螺技术
-
音叉式陀螺仪:
- 结构: 最经典和常见的MEMS陀螺,两个振动臂(音叉)以相反相位振动。
- 原理: 当整体旋转时,科里奥利力会使音叉产生垂直于振动平面的扭转,通过电容检测这个扭转。
- 应用: 广泛应用于消费级产品(手机、游戏手柄)和一些低成本战术级应用。
-
谐振环/半球陀螺仪:
- 结构: 一个或多个微米级的环形或半球形结构,以其固有频率进行振动。
- 原理: 旋转时,科里奥利力会引起振动模式的“进动”,通过光学或电容方式检测这个进动频率的变化。
- 特点: 性能通常优于音叉式,可以达到战术级水平,是目前高性能MEMS陀螺的发展方向。
-
振动轮/盘陀螺仪:
- 结构: 一个微小的轮盘或圆盘在其平面内振动。
- 原理: 与音叉类似,旋转时科里奥利力会引起垂直方向的振动。
- 特点: 结构相对简单,但性能通常不如谐振环式。
挑战与未来发展趋势
挑战:
- 性能瓶颈: 尽管发展迅速,但高端固态振动陀螺的性能(特别是零偏稳定性和随机游走)仍然难以企及激光陀螺和光纤陀螺,无法满足长时间、高精度的战略级导航需求。
- 环境敏感性: 对温度、振动、电磁干扰等环境因素较为敏感,需要复杂的补偿算法。
- 标定与校准: 需要精密的标定过程来消除制造误差带来的初始零偏和标度因子误差。
未来趋势:
- 性能持续提升: 通过新材料(如氮化铝AlN)、新结构(如3D环形)、新工艺(如晶圆级封装)不断提高陀螺的精度和稳定性,向战术级甚至导航级性能靠拢。
- 多传感器集成: 将陀螺、加速度计,甚至磁力计、气压计等集成在单一芯片上,形成九轴或十轴传感器,简化系统设计,提高数据一致性。
- 智能化与算法融合: 结合人工智能和机器学习算法,对陀螺数据进行实时滤波和误差补偿,提升在复杂动态环境下的导航性能。
- 量子陀螺: 这是终极方向,利用原子或光子的量子特性来测量旋转,其精度理论上可以突破经典物理的极限,不随时间漂移,目前仍处于实验室研究阶段,但代表了未来导航技术的颠覆性方向。
固态振动陀螺是现代导航技术,特别是微型化和低成本导航的基石。 它利用科里奥利效应,通过无活动部件的振动结构来感知旋转,凭借其小型、廉价、可靠的巨大优势,推动了惯性导航从昂