本分析将从核心技术、产业链格局、应用场景、挑战与趋势四个维度展开。

(图片来源网络,侵删)
核心技术分析
国内测距小车的技术发展,本质上围绕着“感知-决策-控制”的核心链条,感知”部分,即测距技术,是竞争最激烈、创新最活跃的环节。
主流测距技术方案及其国内发展现状
| 技术方案 | 原理 | 优点 | 缺点 | 国内发展现状与技术特点 |
|---|---|---|---|---|
| 超声波测距 | 发射超声波,通过接收回波的时间差计算距离。 | 成本低廉、技术成熟、近距离测量灵敏度高、不受光线影响。 | 测距距离短(lt;5米)、存在盲区、波束角大、方向性差、易受环境干扰(如软/硬物、风)。 | 定位:入门级和成本敏感型市场的绝对主力。 • 技术成熟度: 技术门槛极低,国内众多厂商都能生产,但性能差异大。 • 市场应用: 广泛应用于教育机器人、智能玩具、简单的避障小车、智能家居(如扫地机边缘探测)。 • 创新点: 主要集中在如何通过算法优化(如多传感器数据融合)来弥补其物理缺陷。 |
| 红外测距 | 发射红外光,通过接收反射光强度或相位差来计算距离。 | 成本较低、响应速度快、结构简单。 | 易受环境光和物体颜色/材质影响(黑色、吸光材质测距不准)、测距距离短、受烟雾/灰尘影响大。 | 定位:超声波的补充,特定场景下的应用。 • 技术成熟度: 技术非常成熟,与超声波类似。 • 市场应用: 常用于巡线小车、颜色识别小车、与超声波配合进行多级避障(如近距离用红外,远距离用超声波)。 • 创新点: 与摄像头结合,实现“视觉+红外”的跟随与避障,在服务机器人中有应用。 |
| 激光雷达 | 主动发射激光束,通过测量激光往返时间来精确测距,并进行扫描,形成点云图像。 | 测距精度高、角度分辨率高、抗光照干扰能力强、生成环境点云信息丰富。 | 成本较高(特别是高性能雷达)、在极端天气(大雨、浓雾)下性能下降、高速运动时有扫描畸变风险。 | 定位:中高端和自动驾驶领域的主流选择,国产化替代的核心战场。 • 技术突破: 这是国内技术进步最快的领域。 以速腾聚创、禾赛科技、览沃科技为代表的中国企业,在全球LiDAR市场占据重要地位。 • 产品特点: - 机械式LiDAR: 早期技术,性能稳定,但成本高、体积大、寿命有限,国内厂商已逐步转向固态。 - 半固态/固态LiDAR(MEMS/转镜/OPA): 这是当前国产化的主流方向。 产品体积更小、成本更低、可靠性更高,非常适合车载和移动机器人平台,速腾聚创的M系列、禾赛的Pandar系列。 • 成本下降: 国产化竞争使得LiDAR价格在过去几年内大幅下降,极大地推动了其在测距小车和AGV上的普及。 |
| 视觉测距 | 主要通过单目、双目或RGB-D摄像头,利用图像处理算法计算距离。 | 成本极低(尤其是单目)、信息维度最丰富(不仅能测距,还能识别物体、场景理解)、被动式感知(不主动发射信号)。 | 对算法依赖极高、计算量大、受光照和天气影响大、双目存在视差匹配难题、RGB-D测距距离有限且精度随距离增加而下降。 | 定位:未来趋势,与多传感器融合是主流方向。 • 算法优势: 中国在计算机视觉领域拥有全球领先的技术实力。 以商汤、旷视、依图、云从等AI公司为首,在目标检测、语义分割、深度估计等算法上积累了深厚的技术。 • 应用模式: - 纯视觉方案: 在一些低速、结构化场景(如室内巡检小车)中应用,对算力要求高。 - 多传感器融合: 这是当前最高性能的解决方案。 将视觉(提供丰富的语义信息)与LiDAR/超声波(提供精确的几何距离)数据融合,取长补短,实现全天候、全场景的精准感知,国内主流的自动驾驶和AGV方案均采用此路线。 |
| 毫米波雷达 | 发射毫米波段的电磁波,通过回波信息计算距离、速度、方位。 | 穿透性强(不受雨、雪、雾、尘影响)、测距距离远、可测速度、全天候工作。 | 分辨率相对较低(难以精确识别小物体)、成本高于超声波和红外、点云数据稀疏。 | 定位:LiDAR的有力补充,主要用于高速运动场景。 • 技术特点: 在汽车ADAS(高级驾驶辅助系统)中应用广泛,国内在车载毫米波雷达领域也实现了突破(如德赛西威、华域汽车等)。 • 在测距小车上的应用: 更多用于室外AGV、无人配送车等需要长距离、全天候感知的场景,与LiDAR形成互补。 |
产业链格局分析
国内测距小车产业链已经形成了从上游核心零部件到中游系统集成再到下游应用的完整生态。
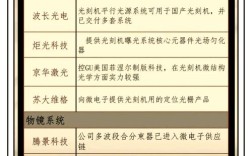
上游:核心零部件供应商
- 传感器厂商:
- LiDAR: 速腾聚创、禾赛科技是全球LiDAR市场的头部玩家,技术实力和市场份额领先。北醒光子、览沃科技、镭神智能等也在各自细分领域有较强竞争力。
- 毫米波雷达: 德赛西威、华域汽车、经纬恒润等传统Tier 1厂商占据主导。
- 摄像头模组: 舜宇光学、欧菲光等全球领先的摄像头模组供应商,为视觉方案提供了基础。
- 超声波/红外传感器: 市场高度分散,大量中小型厂商提供标准化的低成本产品。
- 计算平台供应商:
- 芯片: 华为海思、地平线、黑芝麻智能等是国内AI芯片的领军者,为小车的“大脑”提供了强大的算力支持。
- 嵌入式系统: 树莓派、Jetson(NVIDIA)开发板在科研和原型阶段广泛使用;国内厂商也提供基于国产芯片的工控板和计算平台。
中游:系统集成商
这是国内产业链最庞大、竞争最激烈的环节。
- AGV/AMR厂商: 极智嘉、快仓、海康机器人、新松等,它们不仅制造小车,更提供整套的物流仓储解决方案,其核心竞争力在于将传感器、算法、控制软件和调度系统完美集成。
- 自动驾驶初创公司: 小马智行、文远知行、AutoX等,其技术积累(特别是感知和决策算法)可以反哺到特定场景的测距小车(如园区接驳车、无人巴士)。
- 传统机器人/自动化厂商: 新松、埃斯顿等,它们在工业自动化领域有深厚积累,其测距小车产品更侧重于在结构化工业环境中的应用。
下游:应用领域
- 工业物流(最大市场): 电商仓储、工厂生产线物料搬运,对稳定性、精度和调度效率要求极高。
- 服务机器人: 商场导购、酒店配送、餐厅送餐、医疗运输等,对安全性、人机交互和复杂环境适应性要求高。
- 消费级/教育市场: 编程教育机器人、DIY智能车套件、家庭清洁机器人,对成本极其敏感。
- 特种领域: 农业巡检、电力巡检、安防巡逻、矿山勘探等,对环境适应性、续航和远程控制能力有特殊要求。
主要挑战与未来趋势
当前面临的主要挑战:
- 核心技术“卡脖子”风险: 虽然在LiDAR和视觉算法上取得突破,但高端芯片(如GPU、FPGA)、部分高端光学元件、核心传感器的底层设计和制造能力仍有差距,存在被“卡脖子”的风险。
- 成本与性能的平衡: 在消费级和教育市场,成本是首要考量,性能往往被牺牲,而在高端市场,如何进一步降低高性能传感器(如LiDAR)的成本,是实现大规模商业化的关键。
- 软件算法与生态: 硬件同质化严重,最终的竞争壁垒在于软件算法和开发者生态,国内在算法层面有优势,但在形成像ROS(机器人操作系统)那样统一、开放的软件生态方面仍有不足。
- 安全性与可靠性: 在开放、动态的公共道路上,小车的安全性和可靠性是生命线,这需要通过海量的数据积累、严格的测试验证和冗余设计来保证,投入巨大。
未来发展趋势:
- 多传感器深度融合是必然趋势: 单一传感器无法满足复杂场景的需求,未来小车的感知系统将是“LiDAR+视觉+毫米波雷达+超声波”的深度融合,各司其职,优势互补,实现“全天候、全场景”的精准感知。
- 固态化、小型化、低成本化: 以MEMS、转镜为代表的固态LiDAR将成为主流,其成本持续下降,体积不断缩小,更容易集成到各类小车平台。
- AI与边缘计算的深度赋能: 更强大的AI算法将赋予小车更强的环境理解和自主决策能力,边缘计算芯片的发展,使得复杂的AI模型可以在小车本地实时运行,降低对云端算力的依赖,提高响应速度和数据隐私性。
- 场景化与定制化解决方案: 针对不同行业(如电商、汽车、医药)和不同场景(如室内、室外、结构化、非结构化)的定制化解决方案将成为主流厂商的竞争焦点。
- 云边端协同: 小车(端)负责实时感知和本地决策,边缘节点(如边缘计算网关)负责区域内的协同调度和数据预处理,云端负责全局优化、模型训练和大数据分析,形成高效的云边端协同体系。
国内测距小车技术已经走过了简单的“超声波+红外”阶段,形成了以国产化LiDAR为感知核心、以AI视觉算法为大脑、以多传感器融合为技术路线的全新格局。

(图片来源网络,侵删)
- 优势: 在中低端市场拥有无与伦比的成本优势和供应链完整性;在高端感知硬件(LiDAR)和核心AI算法领域实现了快速追赶甚至部分引领;拥有全球最庞大、最活跃的应用市场,为技术迭代提供了强大动力。
- 劣势: 在高端芯片、核心基础软件等底层领域仍有短板;整体软件生态和标准化建设有待加强;产品的极致可靠性和安全性仍需长期投入验证。
中国正从一个“测距小车技术的应用大国”向“技术强国”迈进,随着核心技术的不断突破和产业链的持续完善,国内测距小车技术将在全球市场中扮演越来越重要的角色。

(图片来源网络,侵删)