can fd技术文档

can fd(controller area network flexible data rate)是一种控制器局域网技术的增强版本,旨在解决传统can总线在带宽、数据容量和效率方面的局限性,随着汽车电子系统复杂度的提升,传统can总线(最大1mbps传输速率、8字节数据段)已难以满足高级驾驶辅助系统(adas)、车载信息娱乐系统(infotainment)等高带宽需求,can fd通过提高传输速率、增加数据段长度、优化错误检测机制等改进,成为车载网络通信的重要技术方案。
技术背景与核心优势
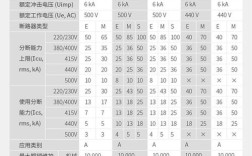
传统can总线基于非归零码(nrz)编码,采用位填充机制确保数据同步,但受限于位时序参数和错误检测范围,其数据传输速率最高为1mbps,数据段长度仅为8字节,而can fd在保留can总线核心帧结构的基础上,引入了灵活数据率(flexible data rate)概念,支持两种传输速率:在仲裁段(包括帧起始、仲裁场、控制场、crc场等)沿用传统can的低速模式(通常为1mbps),在数据段和应答段切换至高速模式(最高可达5mbps甚至更高),这种“双速率”设计既保证了与现有can网络的兼容性,又显著提升了数据传输效率。
can fd的数据段长度从传统的8字节扩展至64字节(部分控制器支持更大数据长度),减少了通信中的协议开销,尤其适用于传输大量传感器数据(如摄像头、雷达信号),can fd优化了crc校验机制:在仲裁段采用15位crc(与传统can一致),在数据段升级为17位或21位crc,提高了错误检测能力,降低了通信失败率。
关键技术特性
-
双速率传输机制
can fd的帧结构分为仲裁段和数据段两部分,仲裁段保持与传统can相同的低速率(如500kbps~1mbps),确保在多节点竞争总线时的稳定性;数据段切换至高速模式(1mbps~5mbps),根据总线负载和节点能力动态调整,在传输诊断数据或大块信息时,高速数据段可显著缩短传输时间。 (图片来源网络,侵删)
(图片来源网络,侵删) -
数据段长度扩展
传统can受限于8字节的数据段长度,需通过多帧传输(如使用can fd的传输协议)处理大数据,而can fd支持12~64字节的数据段(具体长度由控制场的dlc字段定义),减少了帧头、crc等固定开销的占比,传输32字节数据时,传统can需5帧(含4帧数据帧和1帧远程帧),而can fd仅需1帧,效率提升约80%。 -
错误检测与处理优化
can fd在数据段采用17位crc(crc17),相比传统can的15位crc,可检测更多位错误(如突发错误),新增的“end of frame(eof)”字段明确标识帧结束,避免传统can中因位填充错误导致的帧丢失问题,can fd支持“被动错误状态”和“主动错误状态”的动态切换,提高了系统的容错能力。 -
兼容性与互操作性
can fd物理层与传统can完全兼容,支持相同的总线拓扑(双绞线、终端电阻)和电气特性,现有can节点可通过“隐性 dominant”位识别can fd帧,避免解析错误,实现can fd节点与can节点的混合组网(但can节点无法解析can fd的数据段内容)。
帧结构与关键字段
can fd帧包括数据帧和远程帧,其中数据帧是最常用的通信类型,其结构如下表所示:

| 字段名称 | 长度(位) | 说明 |
|---|---|---|
| 帧起始(sof) | 1 | 标志帧开始,显性电平(0) |
| 仲裁段 | 12~32 | 包含标识符(11位或29位)、rtr位(远程请求位,can fd中固定为隐性) |
| 控制段 | 6~16 | 包含edl位(1表示can fd帧)、bps位(数据段速率)、dlc(数据长度代码) |
| crc段 | 17/21 | 数据段的crc校验(传统can为15位) |
| 应答段(ack) | 2 | 包含ack槽和ack界定符 |
| 数据段 | 0~64 | 实际传输的数据,长度由dlc决定 |
| 帧结束(eof) | 7 | 标志帧结束,7个隐性电平(1) |
关键字段说明:
- edl位:位于控制段首位,为1时表示当前帧为can fd帧,为0时为传统can帧。
- bps位:控制数据段的传输速率,0表示与仲裁段相同速率,1表示切换至高速率。
- dlc:4位代码,可定义0~64字节的数据长度(如dlc=9表示12字节,dlc=15表示64字节)。
应用场景与发展趋势
can fd主要应用于车载网络中对实时性和数据量要求较高的场景,包括:
- 高级驾驶辅助系统(adas):传输摄像头、毫米波雷达等传感器的原始数据,需低延迟、高带宽支持。
- 车载信息娱乐系统(infotainment):导航地图、音频视频等大容量数据传输。
- 动力系统与底盘控制:实时传输电机控制、电池状态等关键信息,兼顾可靠性与效率。
- 新能源汽车:电池管理系统(bms)与整车控制器(vcu)之间的高精度数据交互。
随着汽车向智能化、网联化发展,can fd将逐步替代传统can成为主流车载总线,并与以太网、flexray等技术形成分层网络架构,在域控制器架构中,can fd负责域内低速通信,以太网负责跨域高速通信,满足不同场景的需求。
相关问答FAQs
问题1:can fd与传统can总线的主要区别是什么?
解答:can fd与传统can的核心区别在于传输速率、数据段长度和错误检测机制,传统can的最大速率为1mbps,数据段长度限制为8字节,采用15位crc校验;而can fd支持双速率传输(仲裁段低速、数据段高速,最高5mbps),数据段长度扩展至64字节,并采用17位/21位crc校验,显著提升了数据传输效率和可靠性。
问题2:can fd节点能否与传统can节点混合组网?
解答:可以,can fd在物理层与can完全兼容,支持在同一总线上混合部署,can fd帧通过edl位(控制段首位)进行标识,传统can节点因无法识别edl位,会将can fd帧视为“格式错误”的帧并丢弃,但不会影响其正常通信,反之,can fd节点可正确解析传统can帧,实现两种节点的共存,混合组网时需注意总线速率匹配,建议仲裁段采用传统can的速率(如1mbps),以确保兼容性。