CMOS视觉测量技术是一种基于CMOS图像传感器为核心,结合光学成像、图像处理、模式识别和精密控制等多学科交叉的现代化非接触式测量方法,与传统的CCD(电荷耦合器件)传感器相比,CMOS传感器具有集成度高、功耗低、成本低、读取速度快等显著优势,使其在工业检测、精密制造、机器人视觉、医疗影像等领域得到了广泛应用,本文将详细阐述CMOS视觉测量技术的基本原理、系统组成、关键技术、应用场景以及发展趋势。
CMOS视觉测量技术的基本原理是通过光学镜头将待测物体的图像聚焦在CMOS图像传感器上,传感器将光信号转换为电信号,经过模数转换(ADC)后形成数字图像,随后,计算机系统对数字图像进行预处理(如去噪、增强)、特征提取(如边缘、角点、轮廓)、目标识别与匹配,并通过特定的算法计算出待测物体的几何尺寸、位置、形状、表面缺陷等参数,其核心在于利用图像像素信息与实际物理世界之间的对应关系,通过标定过程建立相机坐标系与世界坐标系之间的转换模型,从而实现高精度的非接触测量。
一个典型的CMOS视觉测量系统主要由以下几个部分组成:光学成像系统(包括镜头、光源、滤光片等)、CMOS图像传感器、图像采集卡、处理单元(如工业PC、嵌入式处理器)以及测量软件,光学成像系统负责将待测物体的特征清晰地成像在传感器上,其中光源的选择和设计至关重要,不同的光源(如LED环形光、背光、同轴光等)能够突出物体的不同特征,提高图像对比度和测量精度,CMOS图像传感器作为系统的“眼睛”,其分辨率(像素数量)、像素尺寸、帧率、动态范围等参数直接影响测量系统的性能指标,图像采集卡负责将传感器输出的数字图像传输到处理单元,而处理单元则是系统的“大脑”,运行复杂的图像处理算法和测量程序,测量软件则是人机交互的界面,负责图像显示、参数设置、结果输出和数据管理。
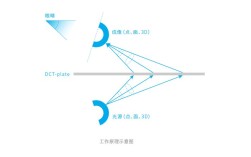
在CMOS视觉测量技术中,多项关键技术共同决定了系统的测量精度和稳定性,首先是相机标定技术,这是实现精确测量的前提,标定过程通过拍摄已知尺寸的标定板(如棋盘格、圆点阵),利用算法(如张正友标定法)计算相机的内参(焦距、主点、畸变系数)和外参(相机相对于世界坐标系的位置和姿态),从而建立像素坐标与物理坐标之间的映射关系,标定精度的高低直接影响后续测量的准确性,因此需要采用高精度的标定板和优化的标定算法,其次是图像处理算法,包括图像预处理(如中值滤波、高斯滤波去噪,直方图均衡化增强对比度)、边缘检测(如Canny算子、Sobel算子)、特征提取与匹配(如SIFT、SURF、ORB算法)以及亚像素边缘检测技术,亚像素边缘检测通过拟合边缘像素的灰度值,可以将边缘定位精度提高到像素级甚至亚像素级(如1/4像素、1/10像素),这是实现高精度测量的核心算法之一,第三是三维视觉测量技术,包括结构光、激光三角法、双目视觉等,结构光测量通过向物体投射特定编码的光栅(如格雷码、相移光栅),通过解码和相位展开得到物体的三维形貌;激光三角法利用激光束照射物体,通过接收反射光的位置变化计算物体高度;双目视觉则模拟人眼的双目成像原理,通过匹配左右图像中的同名点,利用视差计算物体的三维坐标,这些技术极大地拓展了CMOS视觉测量从二维到三维的应用能力,最后是系统同步与实时性控制技术,在高速动态测量场景中(如在线检测、机器人引导),需要确保相机触发、光源照明、数据采集和算法处理之间的精确同步,并通过多线程、GPU加速、FPGA并行处理等技术提高处理速度,满足实时测量的要求。
CMOS视觉测量技术的应用领域极为广泛,在工业制造领域,可用于零件尺寸精密测量(如螺纹、孔径、间距)、产品表面缺陷检测(如划痕、凹陷、污渍)、装配定位与引导(如机器人抓取、精密装配)等,在3C电子行业,CMOS视觉测量系统可用于手机外壳、屏幕、连接器等微小零部件的快速检测,确保产品符合设计规范,在汽车制造领域,可用于车身尺寸测量、零部件安装精度检测、焊缝质量评估等,在半导体行业,晶圆缺陷检测、芯片尺寸测量等对精度要求极高的场景也离不开CMOS视觉测量技术,在医疗领域,CMOS视觉测量可用于医学影像分析(如细胞计数、肿瘤识别)、假肢定制、手术导航等;在航空航天领域,可用于零部件变形检测、复合材料缺陷评估等;在农业领域,可用于农产品分选、尺寸分级等,随着技术的不断进步,CMOS视觉测量还在向智能交通(如车牌识别、交通流量统计)、安防监控(如人脸识别、行为分析)等新兴领域渗透。
尽管CMOS视觉测量技术取得了显著进展,但仍面临一些挑战,在复杂光照环境下的鲁棒性、高反射或透明物体的测量精度、极端工况(如高温、高速)下的系统稳定性等,CMOS视觉测量技术将向更高精度、更高速度、智能化和集成化的方向发展,更高精度的实现依赖于更高性能的CMOS传感器(如全局快门、高动态范围)、更先进的图像处理算法(如基于深度学习的边缘检测和缺陷识别)以及更高精度的标定技术,更高速度则需要更快的传感器帧率、更高效的并行处理架构(如GPU、ASIC)和优化的算法流程,智能化则体现在引入人工智能和机器学习技术,使系统能够自适应不同的测量对象和环境,实现智能化的缺陷分类、参数预测和决策支持,集成化则是指将CMOS视觉测量模块与机械结构、控制系统、数据管理系统深度融合,形成一体化的智能测量解决方案。
相关问答FAQs:
-
问:CMOS视觉测量技术与CCD视觉测量技术的主要区别是什么? 答:CMOS视觉测量技术与CCD视觉测量技术的主要区别在于传感器的工作原理和性能特点,CCD传感器采用电荷转移方式传输信号,具有噪声低、图像质量好的优点,但制造成本高、功耗大、读取速度较慢;CMOS传感器采用类似DRAM的主动像素结构,每个像素都包含光电二极管和放大器,集成度高、功耗低、成本低、读取速度快,且支持全局快门功能,适合高速动态测量,CMOS传感器的动态范围和噪声控制能力近年来已大幅提升,在大多数视觉测量应用中已能替代CCD传感器。
-
问:影响CMOS视觉测量精度的主要因素有哪些? 答:影响CMOS视觉测量精度的主要因素包括:光学系统的畸变(如镜头径向畸变、切向畸变)、CMOS传感器的噪声(如读出噪声、暗电流噪声)、图像处理算法的精度(如边缘检测算法的亚像素能力、标定算法的准确性)、环境因素(如光照稳定性、温度变化、振动)、以及标定过程的精度(如标定板的精度、标定图像的数量和分布),待测物体的表面特性(如颜色、反光率、纹理)和测量系统的机械稳定性也会对测量结果产生重要影响。