感知技术 - 机器人的“五官”
机器人需要像人一样,通过感官来了解外部世界,这主要依赖于传感器技术。

(图片来源网络,侵删)
- 视觉: 这是机器人最重要的感知方式。
- 2D/3D摄像头: 用于识别物体、场景、人脸、文字(二维码、条形码)等,扫地机器人的路径规划、工业流水线上的零件检测。
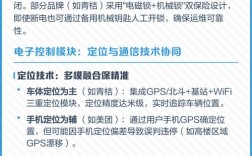
- 深度相机 (如Kinect, LiDAR): 能够获取环境的深度信息,构建3D地图,这在自动驾驶、服务机器人避障和导航中至关重要。
- 触觉: 模拟人的皮肤感觉。
- 力/力矩传感器: 安装在机器人手臂的关节处,感知接触力的大小和方向,用于精密装配、打磨等需要控制力度的任务。
- 触觉传感器: 类似于电子皮肤,可以感知压力、温度、纹理等,常用于人机协作和抓取易碎物体。
- 其他传感器:
- 听觉: 麦克风阵列,用于语音识别、声源定位。
- 距离传感器: 如超声波、红外传感器,用于近距离测距和避障。
- 惯性测量单元: 包含陀螺仪和加速度计,用于感知机器人的姿态和运动状态,是无人机和自平衡机器人保持稳定的关键。
决策与规划技术 - 机器人的“大脑”
当机器人通过“五官”收集到信息后,需要一个“大脑”来处理这些信息,并决定下一步该做什么。
- 人工智能 与机器学习:
- 核心作用: 这是现代机器人的“灵魂”,它让机器人能够从数据中学习,而不是仅仅执行预设的程序。
- 应用:
- 计算机视觉: 用于图像识别、目标检测、语义分割(识别图像中每个像素属于哪个物体)。
- 强化学习: 机器人通过不断试错和与环境互动来学习最优策略,机器人手臂学习抓取不同形状的物体,或者机器人学习走路。
- 自然语言处理: 让机器人能够理解和执行人类的语音指令,实现人机对话。
- SLAM (即时定位与地图构建 - Simultaneous Localization and Mapping):
- 核心作用: 这是移动机器人实现自主导航的基石,机器人在一个未知环境中,一边构建环境的地图,一边利用这个地图来确定自己的当前位置。
- 应用: 自动驾驶汽车、扫地机器人、仓储机器人等所有需要自主移动的场景都离不开SLAM技术。
- 路径规划与运动规划:
- 核心作用: 在已知或部分已知的环境中,为机器人规划出一条从起点到终点的、无碰撞的、最优的路径。
- 应用: 机器人手臂如何绕过障碍物抓取物体,移动机器人如何从A点走到B点。
控制与执行技术 - 机器人的“身体和神经系统”
大脑的决策需要通过身体来执行,这部分技术负责将决策转化为精确的物理动作。
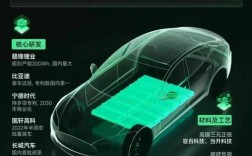
- 驱动系统:
- 核心作用: 提供动力,让机器人的关节和部件运动起来。
- 主要类型:
- 伺服电机: 能够精确控制转动的角度、速度和扭矩,是工业机器人、协作机器人最常用的驱动方式。
- 步进电机: 以固定的步进角转动,适合开环控制,精度要求不是最高的场景。
- 液压/气动驱动: 提供巨大的力量,适用于重型机器人或需要防爆的工业环境。
- 运动控制:
- 核心作用: 接收来自“大脑”的运动指令,并将其转化为对每个驱动器的精确控制信号,确保机器人能够流畅、准确地完成动作。
- 应用: 控制机械臂的末端以毫米级的精度到达指定位置,控制无人机保持平稳悬停。
- 多传感器融合:
- 核心作用: 机器人通常配备多种传感器,融合技术会将来自不同传感器的数据(如视觉、激光雷达、IMU)结合起来,生成一个比任何单一传感器都更准确、更全面的环境模型,提高系统的鲁棒性。
人机交互技术 - 机器人的“沟通方式”
为了让机器人更好地融入人类社会,需要自然、便捷的交互方式。
- 语音交互:
- 技术: 语音识别、自然语言理解、语音合成。
- 应用: 智能音箱、智能客服、语音控制机器人。
- 视觉交互:
- 技术: 人脸识别、表情识别、手势识别。
- 应用: 手机解锁、门禁系统、通过手势控制机器人。
- 物理交互:
- 技术: 力反馈控制、柔性材料。
- 应用: 协作机器人可以与人安全地共享工作空间,当人接触时会停止或施加很小的力。
| 技术类别 | 对应功能 | 核心技术/组件 | 比喻 |
|---|---|---|---|
| 感知技术 | 感知世界 | 传感器(摄像头、LiDAR、IMU等) | 五官 |
| 决策与规划 | 思考决策 | 人工智能、机器学习、SLAM、路径规划 | 大脑 |
| 控制与执行 | 身体行动 | 驱动系统(伺服电机)、运动控制 | 身体和神经系统 |
| 人机交互 | 沟通交流 | 语音、视觉、物理交互技术 | 沟通方式 |
这四大技术领域相互依赖、紧密结合,共同构成了一个完整的机器人系统,随着人工智能,特别是深度学习和强化学习的飞速发展,机器人的“大脑”变得越来越聪明,使得机器人能够处理更复杂的任务,并适应更多样化的环境。

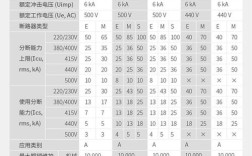
(图片来源网络,侵删)

(图片来源网络,侵删)