核心原理:闭环反馈控制
电子控制技术的核心是闭环反馈控制,其基本思想是:

(图片来源网络,侵删)
持续地将系统的实际输出与期望的目标值进行比较,根据两者之间的偏差(误差),自动调整控制动作,最终使系统的实际输出稳定地接近或等于目标值。
这就像一个经验丰富的司机开车:
- 目标值:保持车速在 80 km/h。
- 感知:眼睛看着速度表(传感器),知道当前车速是 75 km/h。
- 判断:大脑比较(控制器),发现速度低了 5 km/h。
- 执行:大脑指令脚踩下油门(执行器),让车加速。
- 反馈:车速再次上升,速度表读数变化,大脑再次判断,直到车速稳定在 80 km/h。
这个“比较-偏差-调整”的循环过程,就是电子控制技术的精髓,它使得系统具备了自动调节、抗干扰、高精度的能力。
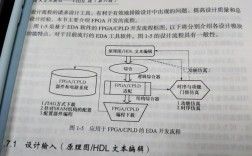
系统基本组成
一个典型的电子控制系统由三个核心部分组成,形成一个信息流动的闭环。

(图片来源网络,侵删)
传感器 - “感官系统”
- 功能:实时检测被控对象(如温度、压力、速度、位置、光线强度等)或系统自身状态(如电压、电流)的物理量,并将其转换成电信号(通常是电压或电流信号)。
- 好比:人的眼睛、耳朵、皮肤等感觉器官。
- 常见传感器:
- 温度传感器:用于测量环境或发动机冷却液的温度。
- 压力传感器:用于测量轮胎压力、进气歧管压力等。
- 速度/位置传感器:如轮速传感器(ABS系统)、曲轴位置传感器(发动机点火)。
- 光电传感器:用于检测物体的有无、颜色或距离。
- 气体传感器:用于检测氧气、一氧化碳等气体浓度。
控制器 - “大脑和神经中枢”
- 功能:接收来自传感器的信号,根据内部预先存储的程序(算法)和数据进行处理和运算,计算出控制指令,并向执行器发出命令。
- 好比:人的大脑和神经系统。
- 核心部件:
- 微控制器:这是现代电子控制系统的核心,它是一个高度集成的芯片,内部包含了:
- CPU (中央处理器):负责运算和逻辑判断。
- ROM/Flash (只读存储器):用于固化存储控制程序和标定数据,断电后不丢失。
- RAM (随机存储器):用于临时存储运行过程中的数据和变量,断电后数据会丢失。
- 输入/输出接口:用于与传感器和执行器进行电平转换、信号调理和通信。
- 定时器/计数器、A/D转换器:用于精确计时和将模拟传感器信号转换为数字信号供CPU处理。
- 微控制器:这是现代电子控制系统的核心,它是一个高度集成的芯片,内部包含了:
执行器 - “肌肉和四肢”
- 功能:接收来自控制器的指令信号,并将其转换为具体的物理动作,从而改变被控对象的状态。
- 好比:人的手、脚、声带等执行器官。
- 常见执行器:
- 电磁阀:通过控制线圈的通断来控制液体或气体的流动方向(如自动变速箱、ABS的液压控制)。
- 继电器:用小电流控制大电流通断的开关,用于控制大功率设备(如车灯、喇叭、燃油泵)。
- 直流电机/步进电机:用于精确控制位置或速度(如电子节气门、汽车门窗、打印机)。
- 压电陶瓷/电磁驱动器:用于产生微小、精确的位移(如喷墨打印机的喷头、燃油共轨系统的喷油器)。
工作流程分析
一个完整的电子控制循环通常包括以下步骤:
-
信息采集:
- 传感器实时监测被控对象的物理量(如温度、压力)。
- 传感器将物理量转换成微弱的模拟电信号(如 0.5V - 4.5V 电压)。
-
信号处理与转换:
- 控制器通过其输入接口接收传感器的信号。
- 信号通常比较微弱,且容易受到干扰,需要进行滤波、放大等调理。
- 控制器内部的A/D转换器将模拟信号转换为数字信号(如二进制数),以便CPU进行处理。
-
控制决策:
 (图片来源网络,侵删)
(图片来源网络,侵删)- CPU从RAM中读取当前的数字信号(代表实际值)。
- CPU从ROM中调用控制程序(通常是PID控制算法、查表法、状态机等)。
- CPU将实际值与程序中设定的目标值(设定点)进行比较,计算出偏差。
- CPU根据偏差和控制算法,计算出需要输出的控制量(应该给电机多大的电压,电磁阀应该开启多长时间)。
-
指令输出与驱动:
- CPU将计算出的控制量(数字信号)通过D/A转换器(如果需要模拟信号)或直接通过数字I/O口输出。
- 输出的信号通常功率很小,无法直接驱动执行器,需要驱动电路(如晶体管电路、MOSFET电路、继电器驱动电路)进行功率放大,将其转换成执行器可以识别和驱动的强电信号。
-
执行动作与反馈:
- 执行器接收到驱动信号后,产生相应的物理动作(如电机转动、阀门打开)。
- 这个动作改变了被控对象的状态(如车速升高、温度下降)。
- 传感器再次检测这个新的状态,并将新的信号传送给控制器,开始下一个控制循环。
这个循环以极高的频率(每秒几十次到数万次)不断重复,从而实现对被控对象的精确、稳定控制。
关键技术与算法
PID控制算法
这是应用最广泛、最经典的控制算法。
- P (Proportional - 比例):控制作用与偏差成正比,偏差越大,控制作用越强,优点是反应快,缺点是有稳态误差(即无法完全消除偏差)。
- I (Integral - 积分):控制作用与偏差随时间的累积之和成正比,它能消除稳态误差,但可能会引起超调和振荡。
- D (Derivative - 微分):控制作用与偏差的变化速率成正比,它能预测未来的偏差趋势,有“阻尼”作用,可以减少超调和缩短调节时间,但对噪声敏感。
通过合理调节P、I、D三个参数的权重,可以实现对不同系统特性的最佳控制。
信号处理技术
- 滤波:去除传感器信号中的噪声和干扰,提高信噪比。
- 标定:将传感器输出的电压值精确地转换为对应的物理量单位(如将 2.5V 标定为 25.0°C)。
通信总线技术
在复杂的系统中(如汽车),ECU数量众多,如果每个ECU都独立连接到传感器和执行器,会导致“线束灾难”,引入了通信总线(如CAN总线、LIN总线)。
- CAN (Controller Area Network):一种高速、可靠的串行通信协议,允许多个ECU在一条总线上共享信息,大大减少了线束数量,提高了系统的可靠性和灵活性。
典型应用领域举例
电子控制技术已经渗透到现代社会的方方面面:
-
汽车工业:
- 发动机控制单元:精确控制燃油喷射、点火时机、怠速等,以达到最佳的动力性、燃油经济性和排放水平。
- 防抱死制动系统:防止刹车时车轮抱死,保证车辆转向能力和制动稳定性。
- 电子稳定程序:在车辆即将失控时,通过对单个车轮进行制动,帮助驾驶员稳定车身。
- 自动变速箱:根据车速、油门开度等自动选择最佳换挡时机。
-
工业自动化:
- PLC (可编程逻辑控制器):用于控制生产线上的各种电机、气动元件、传送带等,实现自动化生产。
- 机器人控制:精确控制机器人的关节运动,完成抓取、焊接、喷涂等复杂任务。
-
消费电子与家电:
- 空调:通过温度传感器和微控制器,自动调节压缩机和风机的运行状态,维持设定温度。
- 智能手机:通过陀螺仪、加速度计等传感器,实现屏幕旋转、计步、游戏交互等功能。
- 数码相机:自动对焦、自动曝光、自动白平衡等都是典型的电子控制应用。
-
航空航天与国防:
- 无人机:通过飞控系统(核心是MCU)实时处理陀螺仪、GPS等传感器的数据,控制电机转速以实现平稳飞行和自主导航。
- 导弹制导:通过惯性导航、GPS等系统,精确控制飞行轨迹。
电子控制技术的原理本质上是利用电子技术构建一个“感知-判断-执行”的智能闭环反馈系统,其核心在于控制器(MCU),它作为大脑,通过运行控制算法(如PID),对来自传感器的实时信息进行处理,并指挥执行器做出精确动作,最终实现对物理世界的自动化、智能化和高精度控制,这一原理是现代科技和工业文明的基石之一。